
Su Geçirmez Ultrasonik Modül JSN-SR04T
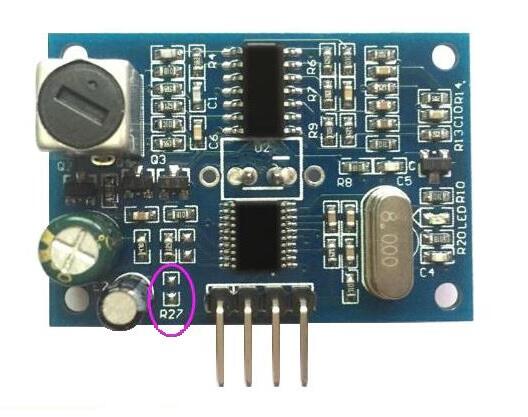
Su Geçirmez Ultrasonik Modül JSN-SR04T ürünü mesafe ölçümünde kullanılmaktadır. Engelden kaçan robot, engelde duran robot, otonom kontrollü robot gibi bir çok robot projesinde sıklıkla kullanılan HC-SR04 ultrasonik mesafe sensörünün su geçirmez versiyonudur. Küçük boyutlu ve kullanımı kolaydır. Düşük voltajda çalışabildiği için, düşük güç tüketimi vardır. Su geçirmez prob ile entegresi bulunmaktadır. 3 Farklı ürün modu bulunmaktadır. Bu modlar entegredeki R27 pinleri ile değişiklik göstermektedir.
- Mode 1: Lehim yapılmamış hali ile
Giriş ve çıkış portları TRIG tigger sıkalası olarak kullanılır. Module otomatik olarak 8 40khz kare dalga göndermektedir. Otomatik olarak dönüş yapan dalgayı taramaktadır. Dönen sinyal için, IO portu üzerinden ECHO çıkışı yüksek bir seviyede, yüksek süre, ultrasonun geri dönüş zamanına kadar olan süresidir.
lansmanından dönüş zamanına. Modül mesafe ölçümünden sonra tetiklenir, ekoyu alamazsanız (neden ölçülen aralığı aşıyorsa veya prob ölçülen nesne üzerinde değilse), ECHO portu otomatik olarak 60MS'den sonra düşük duruma gelir, ölçümün sonu, başarılı olsun veya olmasın işaretlenir. Led göstergesi ve Led güç göstergesi yandıktan sonra modül sinyal alacak ve modül çalışacaktır.
- Mode 2: 47K direnç lehimlenmiş hali
TTL seviyesi için seri çıkış formatıdır. 100MS modülü için otomatik çıkış mesafesi döngüsü gerçekleşir. Seri Baud oranı: 9600,n,8,1.
Modül açıldıktan sonra doğrudan çalışma moduna girecek ve aralık modül içindeki her 100ms'de bir gerçekleştirilecek ve dört adet 8 bitlik veri dahil olmak üzere pin TX'ten bir kare çıkacaktır.
Çerçeve formatı: 0XFF + H_DATA + L_DATA + SUM
1.0XFF: yargılamak için kullanılan verileri başlatmak için bir çerçeve için;
2.H_DATA: mesafe verilerinin üst 8 biti;
3.L_DATA: mesafe verilerinin alt 8 biti;
4.SUM: veri ve 0XFF + H_DATA + L_DATA = SUM (sadece düşük 8) etkisine göre
Not: H_DATA ve L_DATA, 16 bitlik verileri, yani milimetre cinsinden mesafeyi sentezler.
- Mode 3: 120K direnç lehimlenmiş hali
Modül açıldıktan sonra, modül bekleme moduna girer. Seri çıkış formatı TTL seviyesi, seri port baud hızı: 9600, n, 8,1.
RX portu 0X55 komutunu aldığında, modül bir aralık başlatır ve pin 8'den dört tane 8-bit veri ile bir çerçeve çıkarır. Çerçeve formatı: 0XFF + H_DATA + L_DATA + SUM
1.0XFF: yargılamak için kullanılan verileri başlatmak için bir çerçeve için;
2.H_DATA: mesafe verilerinin üst 8 biti;
3.L_DATA: mesafe verilerinin alt 8 biti;
4.SUM: veri ve 0XFF + H_DATA + L_DATA = SUM (sadece düşük 8) etkisine göre
Not: H_DATA ve L_DATA, 16 bitlik verileri, yani milimetre cinsinden mesafeyi sentezler.
Özellikler:
- Çalışma gerilimi: DC 5 V
- Bekleme akım: 5mA
- Çalışma akımı: 30mA
- Akustik emisyon frekansı: 40 khz
- Maksimum ölçüm mesafesi: 4.5 m
- Minimum ölçüm mesafesi: 25 cm
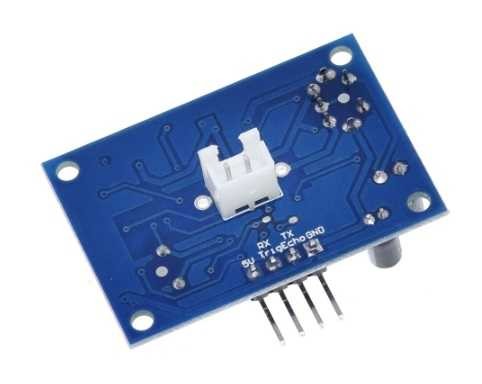
- Bağlantı Pinleri:
- + 5 V (pozitif güç kaynağı)
- Trig (kontrol tarafı) RX
- Echo (alıcı) TX
- GND (negatif)
- Modül boyutu: 41mm x 28.5mm
- Çözünürlük: 0.5 cm civarında
- Açı: 50 dereceden az
- Çalışma sıcaklığı:-10 ~ 70 °
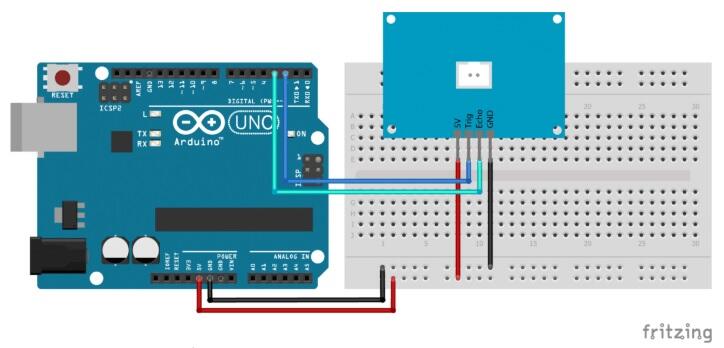
Bağlantı Şeması:
Dokümanlar:
Paket İçeriği:
- 1 x Su Geçirmez Ultrasonik Modül JSN-SR04T